载入中...
搜索中...
未找到
bitbot::YesenseIMU类 参考
Bitbot Encos Yesense IMU类,继承自Encos_VirtualBusDevice, 用户可以使用该类来管理Yesense IMU设备。 更多...
#include <yesense_imu.h>
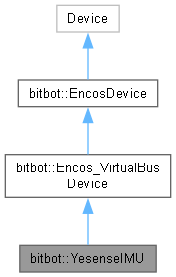
类 bitbot::YesenseIMU 继承关系图:
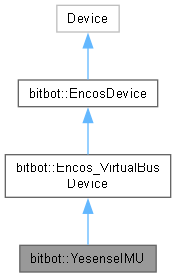
bitbot::YesenseIMU 的协作图:
Public 成员函数 | |
| YesenseIMU (const pugi::xml_node &imu_node) | |
| 构造IMU对象,该对象由Bitbot Encos内核创建。用户无需关心该对象的创建过程。 | |
| virtual | ~YesenseIMU () |
| 析构IMU对象,该对象由Bitbot Encos内核创建。用户无需关心该对象的析构过程。 | |
| float | GetRoll () |
| 获取IMU滚转角度 | |
| float | GetPitch () |
| 获取IMU俯仰角度 | |
| float | GetYaw () |
| 获取IMU偏航角度 | |
| float | GetAccX () |
| 获取IMU x轴加速度 | |
| float | GetAccY () |
| 获取IMU y轴加速度 | |
| float | GetAccZ () |
| 获取IMU z轴加速度 | |
| float | GetGyroX () |
| 获取IMU x轴角速度 | |
| float | GetGyroY () |
| 获取IMU y轴角速度 | |
| float | GetGyroZ () |
| 获取IMU z轴角速度 | |
| float | GetIMUTemperature () |
| 获取IMU温度 | |
 Public 成员函数 继承自 bitbot::Encos_VirtualBusDevice Public 成员函数 继承自 bitbot::Encos_VirtualBusDevice | |
| Encos_VirtualBusDevice (const pugi::xml_node &device_node) | |
| 构造函数 | |
| virtual | ~Encos_VirtualBusDevice ()=default |
| 析构函数 | |
| Public 成员函数 继承自 bitbot::EncosDevice | |
| EncosDevice (const pugi::xml_node &device_node) | |
| 构造函数 | |
友元 | |
| class | EncosBus |
额外继承的成员函数 | |
| Protected 成员函数 继承自 bitbot::Encos_VirtualBusDevice | |
| virtual constexpr bool | VirtualBusDevice () const final override |
| 判断设备是否为虚拟总线设备,虚拟总线设备是指未实际挂载在EtherCAT总线上,但也需要进行数据交换的设备。 | |
| Protected 成员函数 继承自 bitbot::EncosDevice | |
| virtual bool | PowerOn () |
| 默认的上电函数,开发者可以在该函数中实现自己的上电逻辑。 | |
| virtual bool | HasPowerCfg () |
| 判断设备是否有上电配置,开发者可以根据设备类型的实际情况实现该函数。 | |
| virtual bool | PowerOff () |
| 默认的下电函数,开发者可以在该函数中实现自己的下电逻辑。 | |
详细描述
Bitbot Encos Yesense IMU类,继承自Encos_VirtualBusDevice, 用户可以使用该类来管理Yesense IMU设备。
Bitbot Encos Yesense IMU类,继承自Encos_VirtualBusDevice, 用户可以使用该类来管理Yesense IMU设备。 该类使用了Yesense SDK来实现IMU数据的读取和解析。用户可以使用该类来获取IMU的姿态数据和加速度数据。
构造及析构函数说明
◆ YesenseIMU()
| bitbot::YesenseIMU::YesenseIMU | ( | const pugi::xml_node & | imu_node | ) |
构造IMU对象,该对象由Bitbot Encos内核创建。用户无需关心该对象的创建过程。
- 参数
-
imu_node IMU节点的配置文件
成员函数说明
◆ GetAccX()
| float bitbot::YesenseIMU::GetAccX | ( | ) |
获取IMU x轴加速度
- 返回
- float 单位为m/s^2
◆ GetAccY()
| float bitbot::YesenseIMU::GetAccY | ( | ) |
获取IMU y轴加速度
- 返回
- float 单位为m/s^2
◆ GetAccZ()
| float bitbot::YesenseIMU::GetAccZ | ( | ) |
获取IMU z轴加速度
- 返回
- float 单位为m/s^2
◆ GetGyroX()
| float bitbot::YesenseIMU::GetGyroX | ( | ) |
获取IMU x轴角速度
- 返回
- float 单位为rad/s
◆ GetGyroY()
| float bitbot::YesenseIMU::GetGyroY | ( | ) |
获取IMU y轴角速度
- 返回
- float 单位为rad/s
◆ GetGyroZ()
| float bitbot::YesenseIMU::GetGyroZ | ( | ) |
获取IMU z轴角速度
- 返回
- float 单位为rad/s
◆ GetIMUTemperature()
| float bitbot::YesenseIMU::GetIMUTemperature | ( | ) |
获取IMU温度
- 返回
- float 单位为摄氏度(°C)
◆ GetPitch()
| float bitbot::YesenseIMU::GetPitch | ( | ) |
获取IMU俯仰角度
- 返回
- float 单位为弧度(rad)
◆ GetRoll()
| float bitbot::YesenseIMU::GetRoll | ( | ) |
获取IMU滚转角度
- 返回
- float 单位为弧度(rad)
◆ GetYaw()
| float bitbot::YesenseIMU::GetYaw | ( | ) |
获取IMU偏航角度
- 返回
- float 单位为弧度(rad)
该类的文档由以下文件生成:
- C:/Users/ZhouZishun/Documents/Workspace/OwheelNT/Bitbot_Encos/include/device/yesense_imu.h