载入中...
搜索中...
未找到
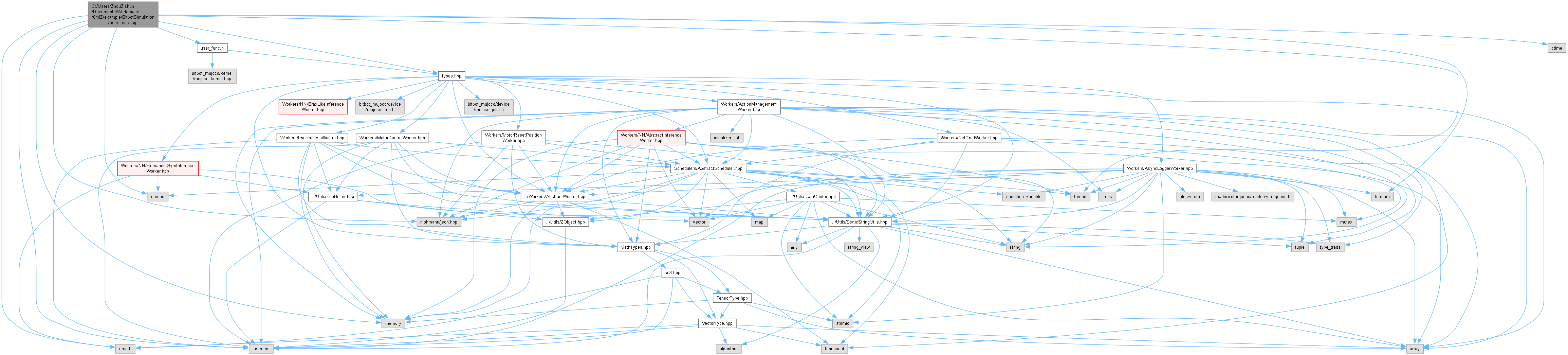
#include "user_func.h"#include <chrono>#include <cmath>#include <ctime>#include <memory>#include <thread>#include <iostream>#include <nlohmann/json.hpp>#include <fstream>#include "types.hpp"
user_func.cpp 的引用(Include)关系图:
函数 | |
| void | ConfigFunc (const KernelBus &bus, UserData &d) |
| void | FinishFunc (UserData &d) |
| std::optional< bitbot::StateId > | EventInitPose (bitbot::EventValue value, UserData &d) |
| std::optional< bitbot::StateId > | EventPolicyRun (bitbot::EventValue value, UserData &d) |
| std::optional< bitbot::StateId > | EventSystemTest (bitbot::EventValue value, UserData &user_data) |
| std::optional< bitbot::StateId > | EventVeloXIncrease (bitbot::EventValue keyState, UserData &d) |
| std::optional< bitbot::StateId > | EventVeloXDecrease (bitbot::EventValue keyState, UserData &d) |
| std::optional< bitbot::StateId > | EventVeloYIncrease (bitbot::EventValue keyState, UserData &d) |
| std::optional< bitbot::StateId > | EventVeloYDecrease (bitbot::EventValue keyState, UserData &d) |
| std::optional< bitbot::StateId > | EventVeloYawIncrease (bitbot::EventValue keyState, UserData &d) |
| std::optional< bitbot::StateId > | EventVeloYawDecrease (bitbot::EventValue keyState, UserData &d) |
| std::optional< bitbot::StateId > | EventJoystickXChange (bitbot::EventValue keyState, UserData &d) |
| std::optional< bitbot::StateId > | EventJoystickYChange (bitbot::EventValue keyState, UserData &d) |
| std::optional< bitbot::StateId > | EventJoystickYawChange (bitbot::EventValue keyState, UserData &d) |
| void | StateWaiting (const bitbot::KernelInterface &kernel, bitbot::ExtraData &extra_data, UserData &d) |
| void | StateSystemTest (const bitbot::KernelInterface &kernel, bitbot::ExtraData &extra_data, UserData &user_data) |
| void | StatePolicyRun (const bitbot::KernelInterface &kernel, bitbot::ExtraData &extra_data, UserData &d) |
| void | StateJointInitPose (const bitbot::KernelInterface &kernel, bitbot::ExtraData &extra_data, UserData &d) |
详细描述
- 日期
- 2025-03-10
- 版权所有
- Copyright (c) 2025