载入中...
搜索中...
未找到
Bitbot Encos 驱动板说明
该文档节选自Encos电机官方文档,详细信息请参阅Encos官方文档。
接线说明及线序
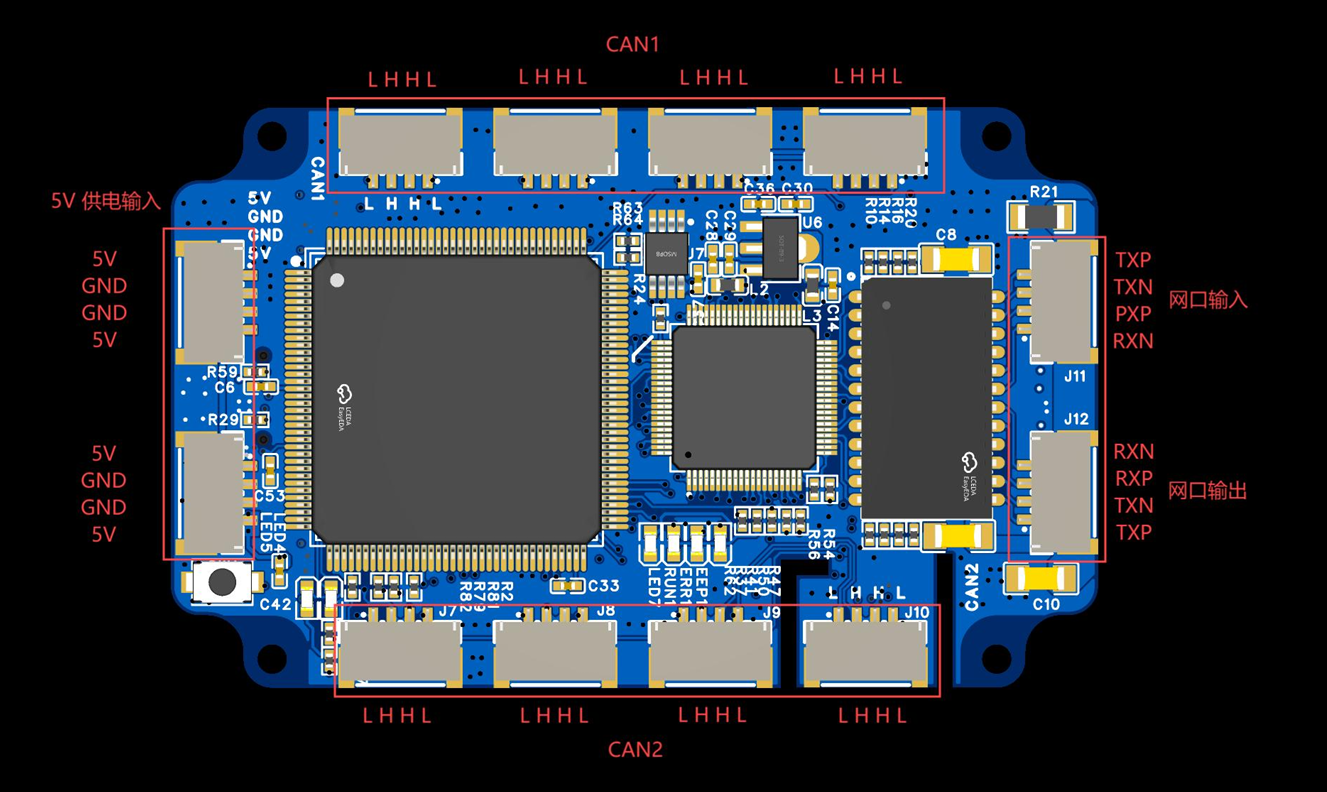
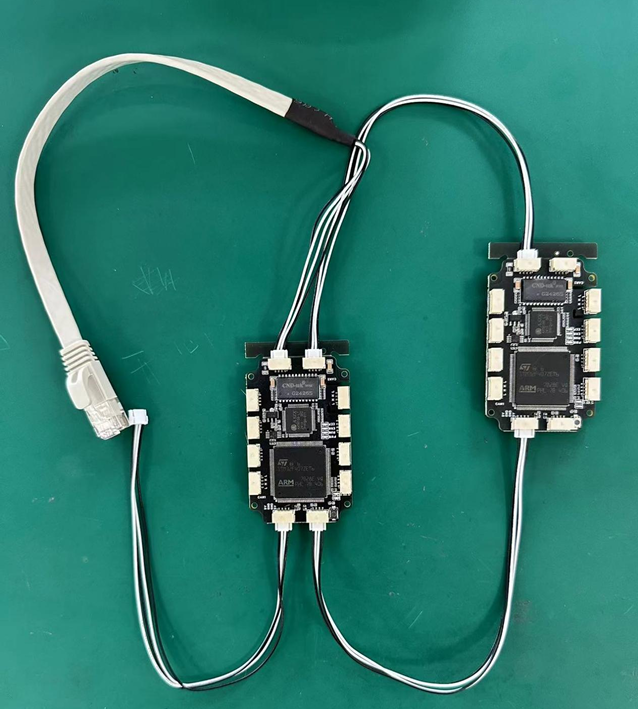
以上图为例,左侧为电源供电口,右侧为网线链接口,上下为CAN信号传输口,均使用1.25×4Pin 接口线进行连接。底部通过4Pin线进行串联,另一侧通过网线连接到主机口中(当串联时,ethercat板子需要注意网口输入以及输出)。
经过测试可串联20块板子保证使用,通过主站下发速度可达1Khz,内部CAN数据通过间隔50us依次下发,一块转接板可最多一次控制六个电机。转接板内设有6个通道,每个通道所对应一个电机,其中1、2、3通道对应转接板右侧的CAN1;4、5、6通道对应转接板左侧CAN2(以上图转接板放置方向为标准)所需代码、上位机资料链接:https://pan.baidu.com/s/1l5z25D0bQwoyJS3KzZ1EAg?pwd=6smn
Bitbot Encos配置文件中的slave_id指的是该转换板的从站ID,根据接线顺序从0递增。id指的是电机本身的CAN总线ID,需保证与电机设置的相同。
注意:BitbotEncos优先使用每个EtherCAT转CAN从站的CAN1通道,即转换板右侧的1、2、3接口,因此在接入电机时需要保证CAN1通道插满后再接CAN2通道。 EtherCAT-CAN从站右侧接口4个接口以及左侧4个接口在电路板上是分别并联互通的,实际仅存在两个CAN通道(而不是6个),因此仅需保证右侧接入3个电机后再接左侧,而不是将所有接口插满。