载入中...
搜索中...
未找到
this file defines the SO3 class, which represents the special orthogonal group in 3D space. 更多...
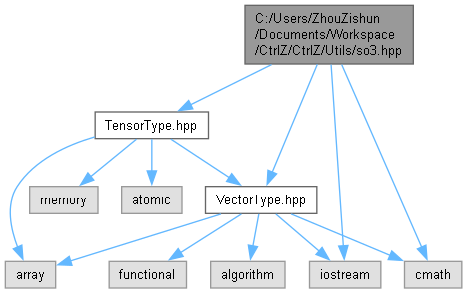
so3.hpp 的引用(Include)关系图:
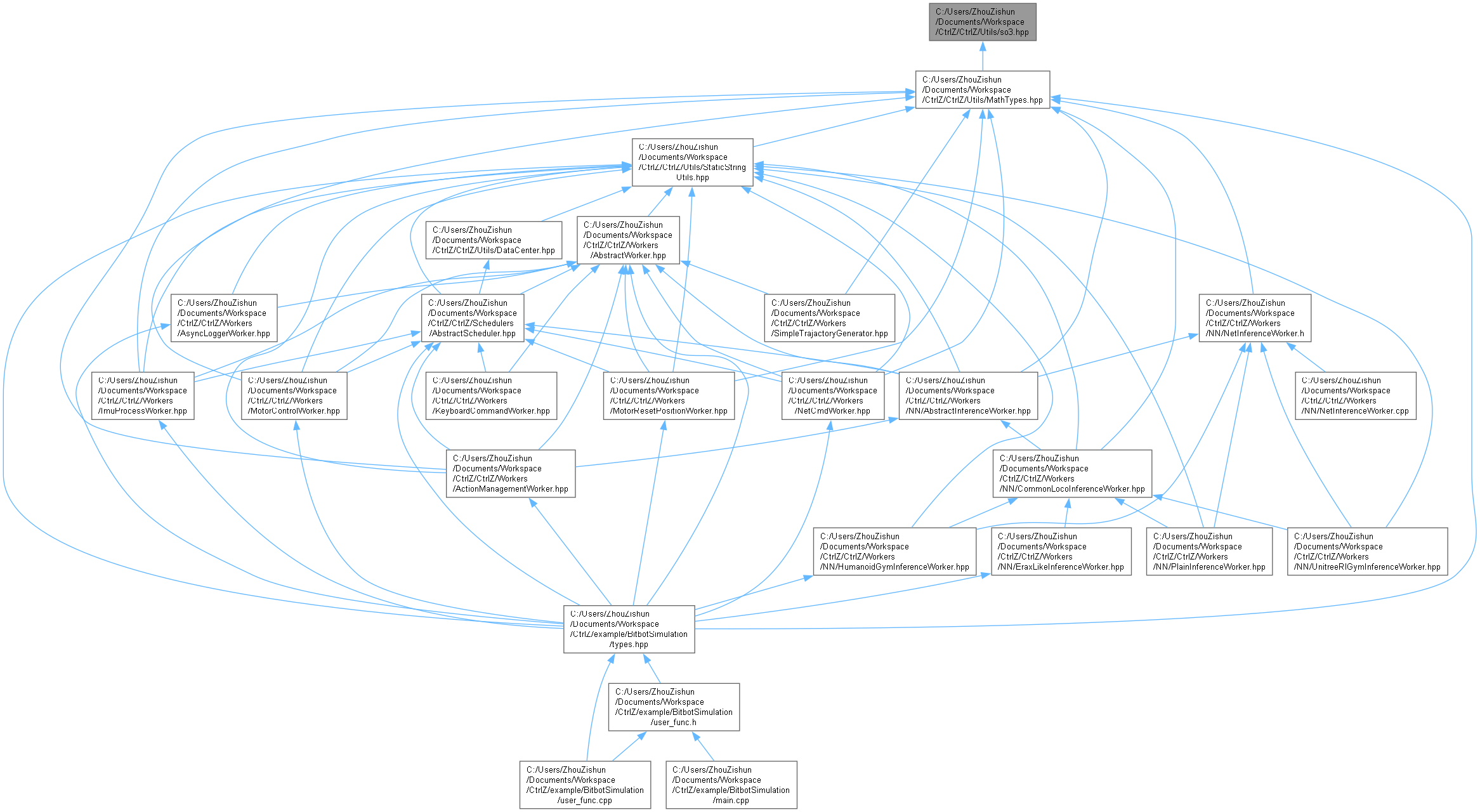
此图展示该文件被哪些文件直接或间接地引用了:
命名空间 | |
| namespace | z::math |
| math namespace, contains some math functions | |
函数 | |
| template<typename Scalar> | |
| z::math::Vector< Scalar, 3 > | z::math::cross (const z::math::Vector< Scalar, 3 > &a, const z::math::Vector< Scalar, 3 > &b) |
| cross product of two 3D vectors. | |
| template<typename Scalar> | |
| z::math::Vector< Scalar, 4 > | z::math::quat_conjugate (const z::math::Vector< Scalar, 4 > &quat) |
| Compute the conjugate of a quaternion. | |
| template<typename Scalar> | |
| z::math::Vector< Scalar, 4 > | z::math::quat_unit (const z::math::Vector< Scalar, 4 > &quat) |
| Normalize a quaternion to unit length. | |
| template<typename Scalar> | |
| z::math::Vector< Scalar, 4 > | z::math::quat_mul (const z::math::Vector< Scalar, 4 > &a, const z::math::Vector< Scalar, 4 > &b) |
| Multiply two quaternions. | |
| template<typename Scalar> | |
| z::math::Vector< Scalar, 3 > | z::math::quat_rotate (const z::math::Vector< Scalar, 4 > &q, const z::math::Vector< Scalar, 3 > &v) |
| Rotate a 3D vector by a quaternion. | |
| template<typename Scalar> | |
| z::math::Vector< Scalar, 3 > | z::math::quat_rotate_inverse (const z::math::Vector< Scalar, 4 > &q, const z::math::Vector< Scalar, 3 > &v) |
| Rotate a 3D vector by the inverse of a quaternion. | |
| template<typename Scalar> | |
| z::math::Vector< Scalar, 4 > | z::math::quat_from_euler_xyz (const z::math::Vector< Scalar, 3 > &euler) |
| Convert Euler angles (in radians) to quaternion representation. | |
| template<typename Scalar> | |
| z::math::Vector< Scalar, 3 > | z::math::get_euler_xyz (const z::math::Vector< Scalar, 4 > &quat) |
| Convert quaternion representation to Euler angles (in radians). | |
| template<typename Scalar> | |
| z::math::Vector< Scalar, 3 > | z::math::so3_from_quat (const z::math::Vector< Scalar, 4 > &quat) |
| Convert a quaternion to an so(3) vector representation. | |
| template<typename Scalar> | |
| z::math::Vector< Scalar, 4 > | z::math::so3_to_quat (const z::math::Vector< Scalar, 3 > &so3) |
| Convert an so(3) vector representation to a quaternion. | |
| template<typename Scalar> | |
| z::math::Vector< Scalar, 4 > | z::math::quat_slerp (const z::math::Vector< Scalar, 4 > &a, const z::math::Vector< Scalar, 4 > &b, Scalar t) |
| Perform spherical linear interpolation (SLERP) between two quaternions. | |
| template<typename Scalar> | |
| z::math::Vector< Scalar, 4 > | z::math::quat_diff (const z::math::Vector< Scalar, 4 > &a, const z::math::Vector< Scalar, 4 > &b) |
| Compute the difference between two quaternions, ensuring the shortest path. | |
| template<typename Scalar> | |
| z::math::Vector< Scalar, 3 > | z::math::so3_diff (const z::math::Vector< Scalar, 3 > &a, const z::math::Vector< Scalar, 3 > &b) |
| Compute the difference between two so(3) vectors, ensuring the shortest path. | |
详细描述
this file defines the SO3 class, which represents the special orthogonal group in 3D space.
- 版本
- 0.1
- 日期
- 2025-05-26
- 版权所有
- Copyright (c) 2025