AbstractScheduler 调度器类型,用于管理任务,工作线程和数据。 更多...
#include <AbstractScheduler.hpp>
类 | |
| struct | TCB |
| Task Control Block 更多... | |
Public 类型 | |
| using | Ptr = std::shared_ptr<AbstractScheduler<CTS...>> |
| 调度器类型的指针类型 | |
Public 成员函数 | |
| AbstractScheduler (const nlohmann::json &cfg=nlohmann::json()) | |
| 创建一个调度器 | |
| virtual | ~AbstractScheduler () |
| 销毁调度器 | |
| template<class ptr, typename ... Args> | |
| ptr * | CreateWorker (Args &&... args) |
| 从调度器创建一个Worker | |
| void | Start () |
| 启动调度器 | |
| void | Stop () |
| 停止调度器,注意停止后无法再次启动调度器,必须重新创建调度器。 | |
| void | SpinOnce () |
| 进行一次调度,调度器将调度主线程任务(MainThreadTask)中的Worker,并为其他任务队列运行一个新的周期。 如果任务运行过慢,调度器会打印一个警告信息。**请不要在Worker中或者其他线程中调用这个函数,这个函数应该在主线程中调用。 否则会出现未定义行为!** | |
| void | Spin () |
| 进行连续任务调度。 | |
| size_t | getTimeStamp () |
| 获取时间辍。 | |
| double | getSpinOnceTime () |
| 获取调度器的时间步长 | |
| size_t | CreateTaskList (const std::string &TaskName, size_t div, bool MainThreadTask=false) |
| 创建一个任务队列,在调度器启动时,Workers中的TaskCreate方法会被调用,用于初始化每个Worker。 | |
| void | DestroyTaskList (const std::string &TaskName) |
| 删除一个任务队列。 | |
| bool | EnableTaskList (const std::string &TaskName) |
| 设置任务列表的启用状态 | |
| bool | DisableTaskList (const std::string &TaskName) |
| 设置任务列表的禁用状态 | |
| void | AddWorker (const std::string &TaskName, WorkerType *worker) |
| 向任务中添加一个工人 | |
| void | AddWorkers (const std::string &TaskName, std::vector< WorkerType * > workers) |
| 批量向任务中添加工人 | |
| template<CTString CT, typename T> | |
| void | SetData (const T &data) |
| 从数据中心中获取数据,并自动更新时间戳 | |
| template<CTString CT, typename T> | |
| size_t | GetData (T &data) |
| 从数据中心中获取数据 | |
 Public 成员函数 继承自 z::ZObject Public 成员函数 继承自 z::ZObject | |
| void | PrintSplitLine (size_t length=60, char c='-') |
| print a split line, default length is 60 and character is '-' | |
静态 Public 成员函数 | |
| static AbstractScheduler< CTS... >::Ptr | Create (const nlohmann::json &cfg=nlohmann::json()) |
Protected 成员函数 | |
| void | run_once (TCB *tcb) |
| 运行任务的一个调度周期 | |
| void | run (const std::string &TaskName) |
| 运行任务 | |
| void | CheckRuntimeFrequency () |
| void | PrintWelcomeMessage () |
Protected 属性 | |
| std::atomic< bool > | CanSpin = false |
| std::thread::id | threadId |
| main thread id | |
| std::map< std::string, TCB * > | TaskList |
| task list | |
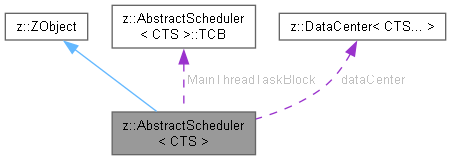
| TCB * | MainThreadTaskBlock = nullptr |
| control block of the main thread task | |
| std::string | MainThreadTaskName |
| main thread task name | |
| std::atomic< size_t > | TimeStamp |
| time stamp | |
| DataCenter< CTS... > | dataCenter |
| data center for storing data with time stamp | |
| std::mutex | SyncMutex |
| task list sync mutex | |
| std::condition_variable | SyncLock |
| task list sync lock variable | |
| std::vector< WorkerType * > | ManagedWorkers |
| worker list, these workers are created by the scheduler and managed by the scheduler. | |
| std::weak_ptr< AbstractScheduler< CTS... > > | weak_ptr |
| weak pointer to the scheduler, used for worker to access scheduler | |
| double | spin_dt = 0.001 |
| task list spin once time | |
| double | HistorySpinDt = 0 |
| std::chrono::steady_clock::time_point | last_time |
| bool | CheckFrequency__ = true |
详细描述
class z::AbstractScheduler< CTS >
AbstractScheduler 调度器类型,用于管理任务,工作线程和数据。
调度器类型是CtrlZ框架的核心类型之一,用于管理任务和工作线程,和工人类(Workers)负责执行每一个具体的任务不同, 调度器类型主要负责管理任务和工作线程。通过在调度器类型中创建任务队列(TaskList),并在这些任务队列中添加工作线程(Workers), 调度器类型可以实现多任务调度,每一个任务队列(TaskList)都有一个独立的线程,用于调度这个任务队列中的工作线程。在运行过程中,调度器会根据 任务流水线中Worker的顺序在每个流水线循环中依次调用Worker的TaskCycleBegin, TaskRun和TaskCycleEnd方法,在任务开始和结束的时候还会调用TaskCreate和TaskDestroy方法。 通过这些方法,工作线程可以在任务开始和结束的时候进行初始化和销毁工作,而在任务运行的时候进行具体的工作。 此外调度器还可以为不同的任务队列设置不同的调度周期,通过设置调度周期,可以实现不同任务队列的不同调度频率,从而实现不同任务队列的不同调度速度。 调度器分为主线程任务(MainThreadTask)和其他任务队列,主线程任务是一个特殊的任务队列,它是在主线程中运行的,而其他任务队列是在独立的线程中运行的。其他任务队列的频率 可以通过设置调度周期来调整,可以设置为主任务队列的整数倍分频(1/n),而主任务队列的频率是固定的,受spinOnce函数的调用频率控制。 调度器类型还可以管理数据管线(DataCenter),用于存储和获取数据,数据管线中的数据通过时间戳来进行读写数据,存储在数据中心中的数据 都是线程安全的,可以在任何线程中读写数据。同时时间辍的存在保证了数据的时序性。
- 模板参数
-
CTS 用于数据中心的键-类型对。其中键是一个编译期字符串常量,类型是数据的类型,通常是一个数字或者一个array。 这些键-类型对用于标识数据中心中的数据,通过键可以获取对应的数据, 通过类型可以确定数据的类型。而且这些键-类型对是在编译期就确定的, 保证了数据的唯一性。具体的使用方法可以参考CTSPair类,CTString类和DataCenter类。
构造及析构函数说明
◆ ~AbstractScheduler()
|
inlinevirtual |
销毁调度器
销毁调度器时将销毁所有的任务队列(TaskList)但不会销毁Worker,Worker的生命周期由调度器外部管理, 调度器只负责管理任务队列。销毁调度器时,调度器会停止所有的任务队列,并等待所有的任务队列线程结束,主线程任务(MainThreadTask)也会被销毁。
成员函数说明
◆ AddWorker()
|
inline |
向任务中添加一个工人
- 参数
-
TaskName 任务名称 worker 工人
◆ AddWorkers()
|
inline |
批量向任务中添加工人
- 参数
-
TaskName 任务名称 workers 工人列表,列表顺序即为任务队列中工人调度的顺序
◆ CreateTaskList()
|
inline |
创建一个任务队列,在调度器启动时,Workers中的TaskCreate方法会被调用,用于初始化每个Worker。
- 参数
-
TaskName 任务名 div 分频系数,用于控制任务的调度频率,任务的调度频率是主线程任务的1/div。如果是主线程任务,div将被忽略。 MainThreadTask 是否是主线程任务。
- 返回
- size_t 任务ID
◆ CreateWorker()
|
inline |
从调度器创建一个Worker
这个函数用于从调度器中创建一个Worker,并将其添加到调度器的ManagedWorkers列表中。 Worker的生命周期由调度器管理,调度器会在销毁时销毁所有的Worker。用户不需要手动销毁Worker。
- 模板参数
-
ptr Worker类型的指针类型,通常是一个继承自AbstractWorker的类型。 Args Worker的构造函数参数类型,可以是任意类型,通常是一些配置参数或者数据。
- 参数
-
args Worker的构造函数参数,可以是任意类型,通常是一些配置参数或者数据。
- 返回
- ptr* 返回创建的Worker指针,用户可以通过这个指针来访问Worker的成员函数和数据。
◆ DestroyTaskList()
|
inline |
删除一个任务队列。
删除一个任务队列时,调度器会停止这个任务队列,并等待当前周期结束,然后销毁任务队列。 销毁时将依次调用Worker的TaskDestroy方法。注意主线程任务(MainThreadTask)不能被销毁。
- 参数
-
TaskName 待销毁的任务名
◆ DisableTaskList()
|
inline |
设置任务列表的禁用状态
该函数的作用与EnableTaskList函数相反。
- 参数
-
TaskName 任务名称
- 返回
- true 任务已禁用
- false 任务未禁用(可能找不到任务)
◆ EnableTaskList()
|
inline |
设置任务列表的启用状态
此函数用于设置任务的启用状态。如果任务被启用,调度器将根据分频设置为该任务进行调度。 如果任务被禁用,任务将不会被调度,并且会一直被阻塞,直到再次启用。 需要注意的是,主线程任务始终处于启用状态,不受此函数的影响。
- 参数
-
TaskName 任务名称
- 返回
- true 任务已启用
- false 任务未启用(可能找不到任务)
◆ GetData()
|
inline |
从数据中心中获取数据
- 模板参数
-
CT 数据名称 T 数据类型
- 参数
-
data 数据
- 返回
- size_t 数据的时间戳
◆ getSpinOnceTime()
|
inline |
获取调度器的时间步长
调度器的时间步长是调度器是所有任务队列的基础调度间隔,也是MainTaskList的间隔。 这个间隔由配置文件设置,但实际调用频率和调度器的SpinOnce函数的调用频率有关。SpinOnce会检查 设置的时间步长是否和实际调用频率一致,如果不一致,会打印警告信息。
- 返回
- double 调度器的时间步长(seconds)
◆ getTimeStamp()
|
inline |
获取时间辍。
时间辍是CtrlZ框架中的一个重要概念,用于标识数据的时序性,时间辍是一个递增的整数,每次调用SpinOnce函数时,时间辍都会递增1, 不同的TaskList中的Worker可以通过时间辍来获取数据,通过时间辍可以保证数据的时序性。 时间辍与TaskList中的分频系数无关,仅与SpinOnce函数的调用频率有关。
- 返回
- size_t 时间辍
◆ run()
|
inlineprotected |
运行任务
- 参数
-
TaskName 任务名
◆ run_once()
|
inlineprotected |
运行任务的一个调度周期
在一个调度周期内,调度器将按照顺序调用任务中的工作者。工作者将按照它们被添加到任务中的顺序被调用。对于每个工作者,将依次调用TaskCycleBegin、TaskRun、TaskCycleEnd函数。
- 参数
-
tcb 给定的任务控制块
◆ SetData()
|
inline |
从数据中心中获取数据,并自动更新时间戳
- 模板参数
-
CT 数据名称 T 数据类型
- 参数
-
data 数据
◆ Start()
|
inline |
启动调度器
启动调度器时将启动所有的任务队列(TaskList)和主线程任务(MainThreadTask),启动任务队列时,调度器会调用任务队列中的Worker的TaskCreate方法, 用于初始化Worker。启动调度器后,调度器会开始调度任务队列中的Worker,调度器会根据任务队列中的调度周期来调度任务队列中的Worker, 调度周期是通过调度器的SpinOnce函数来控制的,SpinOnce函数会在主线程中调用,用于调度任务队列中的Worker,当任务队列中的Worker运行过慢时, 调度器会打印一个警告信息。
值得注意的是创建的非主线任务默认是不使能的,需要通过EnableTaskList函数来使能任务队列,使能任务队列后,任务队列中Worker的调度周期才会生效, 任务会在第一个Worker的TaskCycleBegin前被阻塞,直到任务队列被使能。然而在任务创建的时候,任务队列中的Worker会被调用一次TaskCreate方法, 用于初始化Worker,不受使能状态的影响。主线程任务(MainThreadTask)是默认使能的,不受使能状态的影响。
该类的文档由以下文件生成:
- C:/Users/ZhouZishun/Documents/Workspace/CtrlZ/CtrlZ/Schedulers/AbstractScheduler.hpp