该文档节选自Encos电机官方文档,详细信息请参阅Encos官方文档。
运动模式
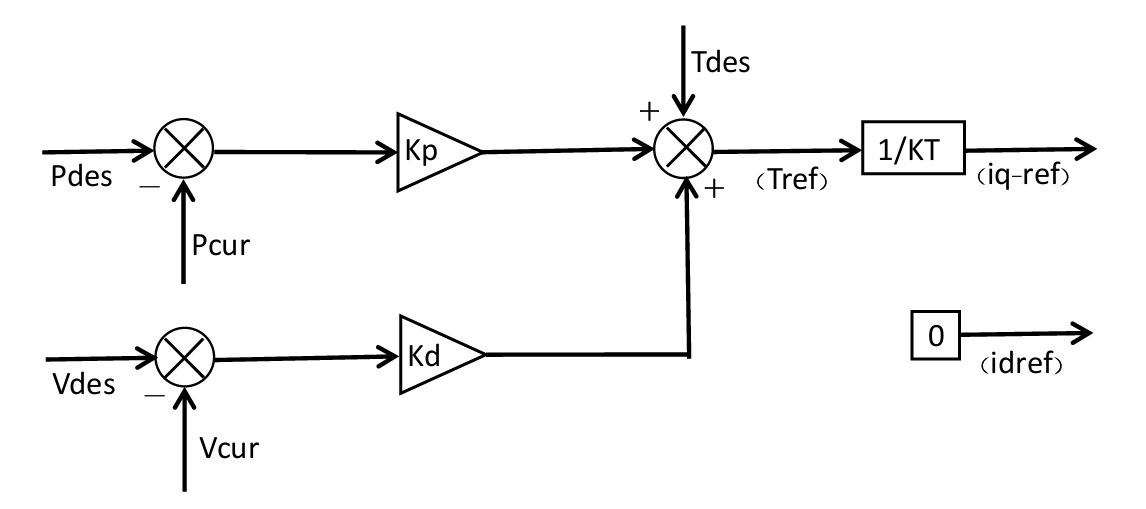
发送该指令调用的是力位混合控制,最终输出电流给电机,电流由如下三个部分组成:

其中指令中的KP、KD参数是随时更改的参数,KT是电机扭矩常数。本模式主要用于足式机器人的控制。空载下KP参考值为15,KD参考值为0.5。(不同型号电机对应的电流范围、扭矩范围是不同的)
位置伺服模式
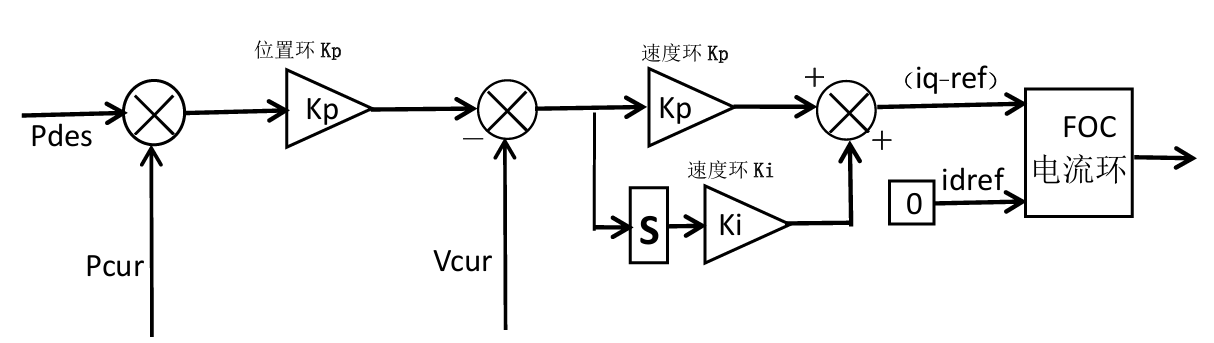
给定期望位置大于±180度,即可多圈转,但是重启上电会重置圈数。 伺服控制模式为三环控制,最内环为电流环,电流环主要有PI控制器控制,参数用户不可更改。位置环控制其实为KP、KD控制,KP在此系统中称为反馈补偿增益,KD称为阻尼系数。内环速度环调用伺服控制模式速度控制,采用的是Encos自行研发的自适应算法,不用频繁改参数去适应负载。位置环的KP、KD对应VESCtool软件中的取值范围为0~0.1,参考值KP:0.006,KD:0。伺服位置控制有三个输入参数,分别为期望位置P、期望速度V和电流阈值I,即电机从当前位置P0按期望的速度V运转。到期望位置P,从P0到P的过程中,速度最大值为V,在P0和P特别小,而V设置的过大的情况下,实际运行时速度可能无法达到V。同时在P0到P过程中,电机的最大电流为I,及产生的最大扭矩Tmax=I*扭矩常数。若遇到的负载超过该扭矩,则电机堵转并保持力矩Tmax。
速度伺服模式
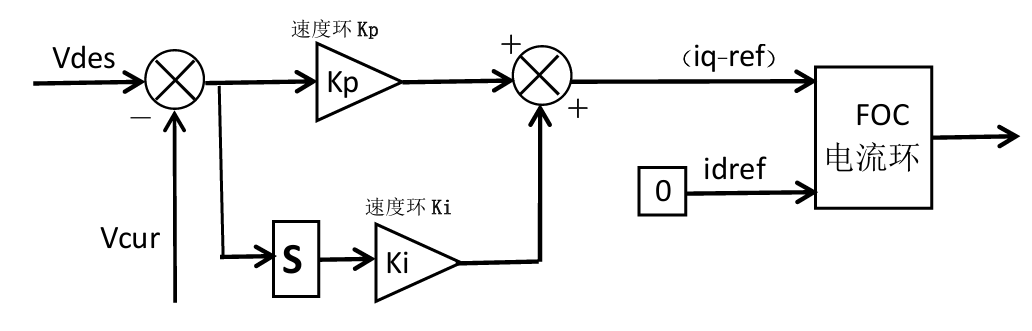
速度环控制为磁链观测控制,参数较多,提供给客户更改的参数为磁链观测增益和扰动补偿系数,磁链观测增益建议取值范围为0.0001~1,参考值为0.12,扰动补偿系数建议取值范围为0~1,参考值为0.08。使用出厂设置的值,经过测试已能适应大部分负载情况,建议用户不要随意改变该值,在有相关经验后或在官方技术指导下再更改(以上所述取值范围均对VESCtool上的设置而言,对于CAN中的设置范围请查看通信协议)。
力矩/电流模式
用电流/力矩控制电机时,电机只要转动,必然会持续加速至最高速,调试时应当注意安全!